اختصاصی از
فایل هلپ آموزش کتیا، شبیه سازی مکانیزم های دوبعدی با فرمان Animate Constraint در محیط Sketcher نرم افزار کتیا CATIA دانلود با لینک مستقیم و پر سرعت .


با استفاده از فرمان Animate Constraint می توانیم تغییرات یک قید اندازه ای را در یک محدوده مشخص مشاهده نماییم. روش کار بدین صورت است که ابتدا قیدهای لازم را بر روی اسکچ (ترسیمه) مورد نظر ایجاد می کنیم تا اسکچ مربوطه به وضعیت Iso Constrained قرار بگیرد. از مزایای این فرمان (Animate Constraint) این است که شما به راحتی و سهولت قادر خواهید بود مکانیزم های دوبعدی ساده و پیچیده را شبیه سازی نمایید.
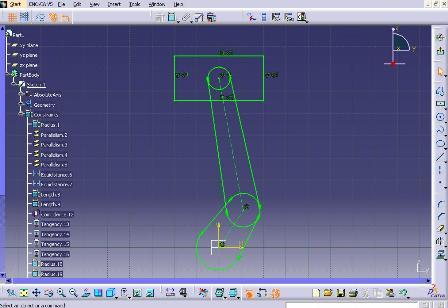
(شبیه سازی مکانیزم حرکت رفت و برگشت پیستون در داخل سیلندر)
به عنوان مثال مهندسان فعال در صنعت برای توجیه طرح و مکانیزمی که در ذهن دارند می توانند به صورت دو بعدی و ساده نحوه عملکرد مکانیزم مربوطه را در این محیط شبیه سازی نموده و به رویت همکارانشان برسانند یا یک معلم می تواند به عنوان مثال مکانیزم رفت و برگشت پیستون را در داخل سیلندر به صورت دو بعدی شبیه سازی نموده و در کلاس درس به شاگردانش نمایش دهد و باعث درک بهتر دانش آموزان گردد...
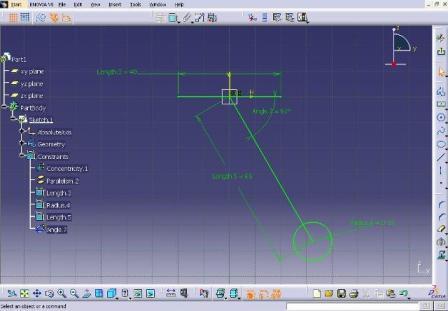
(شبیه سازی مکانیزم حرکت نوسانی آونگ تحت زاویه معین)
جهت خرید آموزش صوتی تصویری شبیه سازی مکانیزم های دوبعدی با فرمان Animate Constraint در محیط Sketcher نرم افزار کتیا CATIA (زمان آموزش: 15 دقیقه) به مبلغ فقط 2000 تومان و دانلود آن بر لینک پرداخت و دانلود در پنجره زیر کلیک نمایید.
!!لطفا قبل از خرید از فرشگاه اینترنتی کتیا طراح برتر قیمت محصولات ما را با سایر فروشگاه ها و محصولات آن ها مقایسه نمایید!!
انسان های بزرگ اینگونه می اندیشند: همواره سعی می نمایند از حداقل امکانات، حداکثر استفاده را ببرند!!!
!!!تخفیف ویژه برای کاربران ویژه!!!
با خرید حداقل 10000 (ده هزارتومان) از محصولات فروشگاه اینترنتی کتیا طراح برتر برای شما کد تخفیف ارسال خواهد شد. با داشتن این کد از این پس می توانید سایر محصولات فروشگاه را با 20% تخفیف خریداری نمایید. کافی است پس از انجام 10000 تومان خرید موفق عبارت درخواست کد تخفیف و ایمیل که موقع خرید ثبت نمودید را به شماره موبایل 09365876274 ارسال نمایید. همکاران ما پس از بررسی درخواست، کد تخفیف را به شماره شما پیامک خواهند نمود.
دانلود با لینک مستقیم
آموزش کتیا، شبیه سازی مکانیزم های دوبعدی با فرمان Animate Constraint در محیط Sketcher نرم افزار کتیا CATIA 
